案例 | 未来机器人助力传统制造企业内部物流自动化探索

随着生育率的下降,人口红利的优势逐渐褪去,如今的“世界工厂”正面临用工难的问题。各大传统型制造企业屡出高额入职奖金来吸引人才,更有部分产业开始向东南亚人口充足的地区转移。然而,这并不能从根本上解决问题。中国的制造业如何突破用工困局,保持领先优势?这个问题困扰着许多传统制造企业的管理者。
为了应对这个难题,某传统履带制造商(以下称“客户”)选择了加快生产制造无人化进程,开启了内部物流无人化变革的探索之路。
项目概况
成立于20年代初,客户一直追求卓越制造和研发创新,不断引入新产品,为更广阔的市场提供服务。与未来机器人的合作,也符合他们不断创新以顺应社会发展的理念。
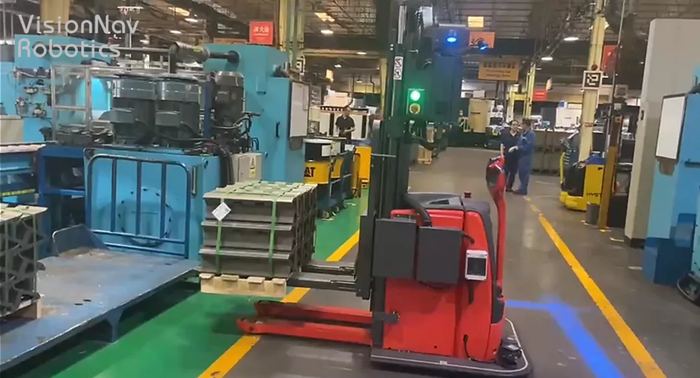
客户主营生产和销售履带总成、链条及主链节等高质量和低成本的挖掘机和推土机底盘零部件,拥有厂房面积约3400平方米,员工300余人,计划将储存在仓库的底盘原料通过无人叉车自动转运至生产线,对接底盘生产。因为生产车间人员走动较为频繁,要求设计方案能应对人机混场的情况,达到人机协同、物流自动化的目的。
项目难点
丨快速衔接产线用料需求
为满足产线的原料供应,需要准确获取生产线原料需求,以及原来存储位置及状态信息,让无人叉车在最短时间内运输补足原料。
丨人机混场,兼顾安全与效率
客户生产车间与原料储存区处于同一空间,同时有车间人员作业,作业环境较为复杂。
解决方案
经过对客户车间生产工艺特点、车间布局、物料规格、物流运输的综合评估,未来机器人规划了基于托盘堆高式无人叉车和中控调度系统的产线物流无人化解决方案。通过导入视觉导航无人叉车,无需改造现场,确保灵活性和扩展性,适配人车混场以及窄道原料运输的工作场景;而中控调度系统能够充分对接客户产线需求和仓库信息,实现信息流和物流的匹配。
丨无人叉车作业流程设计
1) 工厂人工通过呼叫设备下发搬运需求,中控系统调度无人叉车前往指定库位取料,运送至需求产线对应的上料位底座,把托盘货物放置在指定位置;
2) 当有上料位底座空托盘时,人工通过呼叫设备下发搬运需求,中控系统调度无人叉车前往指定位置取空托盘,运送至空托盘存储区。
丨无人叉车功能设计
项目的核心是未来机器人视觉导航无人叉车,采用自主研发的视觉定位、感知和控制技术,可以实现物料的精准、高效、柔性搬运。无人叉车及配套控制系统具备以下功能:
1)定位和感知。系统利用安装在无人叉车上的相机抓取客户现场环境图像,提取环境图像自然特征信息,进而建立客户现场自然特征地图,并结合视觉自然环境地图,获取高精度、高稳定性的无人叉车全域位置和姿态信息,从而实现高效、高精度、高稳定性的自主定位、运动控制和导航功能。
2)路径规划。基于感知和定位,结合客户现场实际环境,无人叉车快速计算作业最有路径。在一定的偏差范围内,可以根据视觉SLAM导航SLAM系统自动找回预定的轨道路线,并进行自动校正。
3)控制和通讯。配合机器人中控调度系统,实现无人叉车的远程监控。依托云储存大数据技术,无人叉车可将自身状态以数据形式反馈给中控系统,实现中控系统与无人叉车的信息交互。中控调度系统界面简洁,操作人员可通过简单培训迅速掌握操作。
4)安全保障。无人叉车配备360度安全防护措施,保持障碍物和叉车之间的安全距离,确保人车货的安全。车身侧面装备紧急关停按钮,进一步确保车辆运行安全。
实现价值
本项目是客户探索工厂内部物流无人化的第一步,实现了原材料无人化自动搬运,无缝对接生产线,及时相应需求,节省了大量人力成本继而降低了生产总成本。无人叉车7*24小时模式,能满足日夜班次轮转的生产需求,保证内部物流无间断有效运转。
结语
自工业革命以来,工业的发展就是利用工具,解放人力的发展史。自动化工具发展到如今,越来越精细化、专业化。未来机器人专注于工业无人车辆细分领域的技术研发和推广,致力于为客户提供有价值的工业物流无人化方案,助力更多的企业实现工业自动化,让中国制造永葆活力!
热点文章
-

创新与服务并重 于大势中觅商机
2024-11-18
-

硬控全场目光!大福中国惊艳亮相CeMAT ASIA 2024
2024-11-15
-

米亚斯丨Miniload堆垛机实现变频器自动化通电测试仓储解决方案
2024-11-18
-

杭叉集团丨鹏成科技发布质保8年16000小时且剩余SOH不低于70%的叉车电池
2024-11-15
-

突破空间束缚 | 林德电动三向堆垛叉车赋能宝连通仓储升级
2024-11-21
-

“木牛流马”第二个独立运营品牌 “PALOTEL”托盘密集存储专家发布
2024-11-19
-

更大设计自由度,德马格推出A22-V和A28-V加强型铝合金轨道系统
2024-11-18
-
创新与服务并重 于大势中觅商机
尽管目前中国制造业大环境整体上还处于经济紧缩的状态,但品牌历史悠久的起重行业翘楚——科尼并没有迷失方向,而是把工作和规划做到前面,在低迷中寻找商机,在新行业中挖掘生机,无论产品销售还是工业服务都保持了良好的成长态势,这不仅得益于对市场环境的准确判断,也是对自身业务的良好布局。听科尼集团东北亚区总裁陈清波先生谈时局,聊创新,话低碳,看未来,不仅是一种工作分享,更是一种高价值的思维启迪。
作者:
-
2024进博会:林德车队管理系统
-
2024进博会:林德无人叉车
-
2024进博会:林德氢燃料电池系统叉车
-
北起院:顺大势 成大器
-
智慧仓储·高效物流:制造业物流的转型秘籍







评论
加载更多