大规模机器人集群调度再筑护城河!极智嘉优质论文获顶级会议ICRA 2022收录
近日,机器人技术领域的顶级国际会议ICRA 2022 (IEEE International Conference on Robotics and Automation) 公布了最终论文录用结果,全球AMR引领者极智嘉(Geek+)两篇优质论文成功入选,不仅彰显了极智嘉在AMR领域雄厚的科研底蕴和创新能力,更是对极智嘉构筑稳固创新护城河的再度验证和背书。

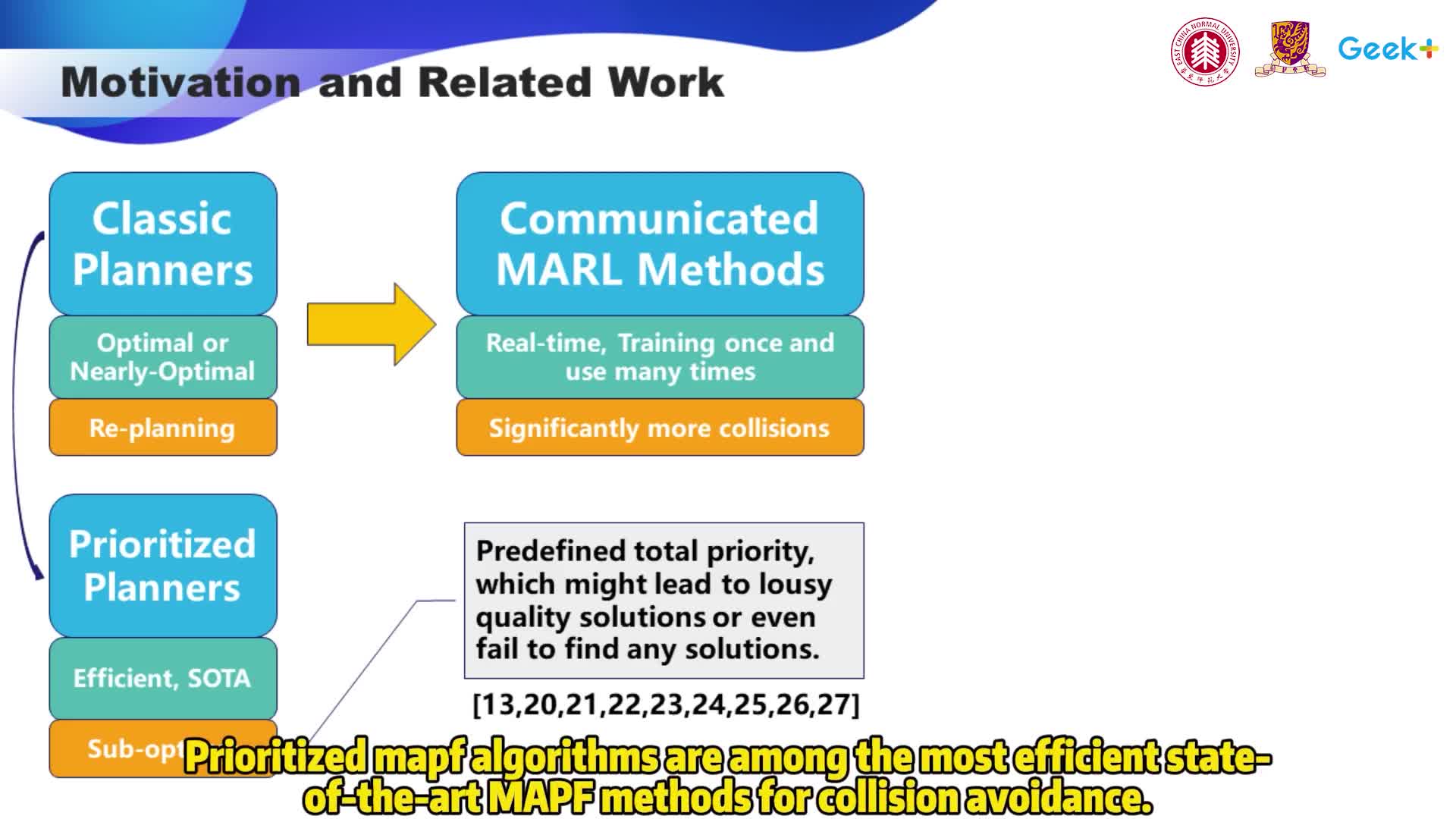
此次获选论文中,由极智嘉AI研究院联合华东师范大学和香港中文大学(深圳)发表的论文《Multi-Agent Path Finding with Prioritized Communication Learning》展示了行业前沿的多智能体分布式路径调度AI算法,以先进的学术成果直击产业应用痛点。
极智嘉机器人算法平台部联合卡耐基梅隆大学(CMU)提出的全新提取对象描述符算法论文也获得了ICRA收录,再次印证了极智嘉在移动机器人视觉和V-SLAM定位导航方面备受学术权威的认可!更值得一提的是,该论文此前已在著名机器人期刊IEEE Robotics and Automation Letters(RA-L)上成功发表。
算法创新工程化升级
高效调度大规模机器人集群
得益于深度神经网络的成功应用,大量基于学习的算法近年来被提出用以解决传统路径规划器无法处理的实时性问题。然而,这些方法为了实现良好的可扩展性,主要采用完全去中心化框架,从而使得算法输出的路径会产生大量的碰撞。受传统路径规划器的启发,极智嘉AI研究院入选论文引入“去中心化路径规划-中心化避障”框架,提出了一种基于通信的多智体深度强化学习算法来求解多智体路径规划问题。
全新多智能体分布式路径调度AI算法经过工程化后大幅度提升了机器人的调度资源利用率,可以支持单仓3000台以上机器人并行智能移动和高效调度。相比于现有技术,在同样调度规模情况下,可以节省服务器成本60%以上,并有效提升调度系统的任务执行流畅性和运行稳定性。
论文内容详解
论文首先提出了一个新颖的数据驱动的优先级学习机制,并将优先级作为通信协议引入到基于通信的多智体深度强化学习中,得到最终的基于“去中心化路径规划-中心化避障”框架的优先通信学习算法 PICO。在大规模稠密障碍物的仿真环境中,PICO 在实时性、可扩展性以及解的最优性上,都大幅超过现有的基于学习的多智体路径规划算法。
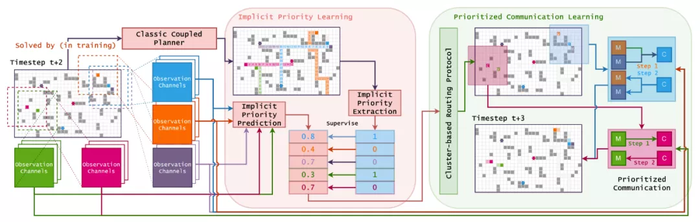
图1 算法流程图
PICO 包含两个交替的学习阶段,即隐式优先级学习阶段和优先通信学习阶段。在隐式优先级学习阶段,PICO通过模仿传统的中心化路径规划器来构建一个替代性的模仿学习任务,来预测每个智能体局部优先级。在优先通信学习阶段,PICO会使用在每个时刻为所有机器人预测的局部优先级来构建整个机器人群体的通信拓扑,通过该拓扑传递基于多智体深度强化学习得到的通信信息,会使得每个机器人获得非对称的全局信息,据此进行决策会使得决策结果基于隐式的动态约束,从而促进所有机器人产生无碰撞的路径规划结果。

图2 优先通信学习过程可视化
论文在大小为20x20,且具有不同智能体数目(8,16,32,64)以及不同障碍物密度(0%,10%,20%,30%)的仿真环境中与现有的基于学习的多智体路径规划算法PRIMAL、DHC以及基于预定义优先级的PICO算法消融版本PICO-Heuristic进行对比实验后,在机器人碰撞次数、障碍物碰撞次数、成功率、路径长度等方面,PICO的表现均大幅超过基准算法。
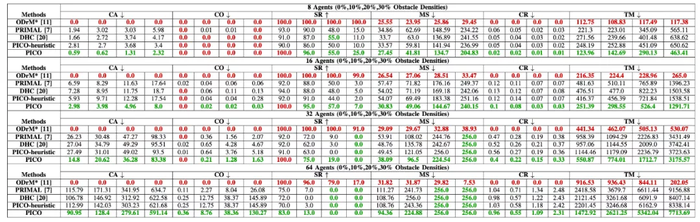
图3 算法性能对比
1. 论文链接:http://arxiv.org/abs/2202.03634
2. 工程代码:https://github.com/mail-ecnu/PICO
热点文章
-

创新与服务并重 于大势中觅商机
2024-11-18
-

米亚斯丨Miniload堆垛机实现变频器自动化通电测试仓储解决方案
2024-11-18
-

突破空间束缚 | 林德电动三向堆垛叉车赋能宝连通仓储升级
2024-11-21
-

中力丨直面零下28度极寒挑战!别格乔双伸位书写冷链行业硬核仓储
2024-11-22
-

合肥极智嘉机器人有限公司盛大开业,合肥制造基地正式投产
2024-11-21
-

“木牛流马”第二个独立运营品牌 “PALOTEL”托盘密集存储专家发布
2024-11-19
-

更大设计自由度,德马格推出A22-V和A28-V加强型铝合金轨道系统
2024-11-18
-
创新与服务并重 于大势中觅商机
尽管目前中国制造业大环境整体上还处于经济紧缩的状态,但品牌历史悠久的起重行业翘楚——科尼并没有迷失方向,而是把工作和规划做到前面,在低迷中寻找商机,在新行业中挖掘生机,无论产品销售还是工业服务都保持了良好的成长态势,这不仅得益于对市场环境的准确判断,也是对自身业务的良好布局。听科尼集团东北亚区总裁陈清波先生谈时局,聊创新,话低碳,看未来,不仅是一种工作分享,更是一种高价值的思维启迪。
作者:
-
2024进博会:林德车队管理系统
-
2024进博会:林德无人叉车
-
2024进博会:林德氢燃料电池系统叉车
-
北起院:顺大势 成大器
-
智慧仓储·高效物流:制造业物流的转型秘籍







评论
加载更多