科尔摩根丨NDC 8在轮胎行业中的应用
在轮胎行业迈向智能制造、柔性生产的关键阶段,厂内物流自动化成为提升效率、降低成本、保障品质的核心环节。科尔摩根NDC平台的CVC700凭借卓越的控制性能、工业级可靠性与全场景适配能力,成为轮胎企业AGV/AMR自动化物流系统的 “智慧大脑”,为炼胶、压延、成型、硫化全工序物料流转提供精准、稳定、高效的控制支撑。
轮胎生产环境复杂,高温、粉尘、油污、空间狭窄且物料重载多样,对移动设备控制提出严苛要求,而且轮胎大多情况下AGV数量众多,正符合NDC可以同时调度大量AGV稳定运行的特点,其中在硫化区域,硫化机不能稳定的把托盘放在固定位置,托盘往往有角度,左右前后方向的倾斜,这给AMR取托盘造成了很大麻烦,NDC针对这种情况,开发了料腿识别功能(U-Zone: Racking Finder Function),很好的解决了这一问题。
本功能在不添加任何硬件的情况下,通过导航激光头(如LS2000,NANO等)即可实现类似相机拍照,再按拍照结果动态改变取货路径的功能。
NDC在U-Zone功能包中集成了料腿识别功能,只需要将个别参数按照实际情况添加即可,需要添加的参数如下:
01、RackFinderEn(BOOL)
置1这个参数使能搜索料腿功能,找到料腿后AGV按计算的外部路径行走。在找到料腿后,即可置0,需要在PLC里添加逻辑。
02、RackFinderEno(BOOL)
是后台参数,配合RackFinderEn使用,后台找到料腿或者执行找货腿命令后没有扫搜到合适的料腿,后台都会把RackFinderEno置1,当RackFinderEn变0后,这个变量也会被后台置0,逻辑与触发黑盒的EN、ENO相似。
03、RackFinderErrorCode(INTEGER32)
搜索料腿时出错的错误代码,目前只有0和1两个数值,1代表出错,0代表正常。
04、RackLegDiameter(INTEGER32)
料腿的直径,单位mm。
05、RackWidth(INTEGER32)
货架的前后宽度,单位mm。
06、RackLength(INTEGER32)
货架的左右宽度,单位mm。
07、RackLateralOffset(INTEGER32)
调整这个参数可以改变AGV在料架下左右方向的停止位置,单位mm。
08、SensorName(STRING)
使用扫描料腿激光头的名称,如果使用FrontNanoScan3扫描料腿,这里填FrontNanoScan3,如果使用LS2000扫描料腿,这里填LS2000。
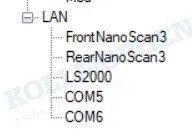
09、SensorId(INTEGER32)
使用扫描料腿激光头的ID。这个数从0开始,如下图,如果使用FrontNanoScan3扫描料腿,这个数就是0,如果使用LS2000扫描料腿,这个数就是2。(如果有com口,com不算)。
10、ExternalPathSpeed(INTEGER32)
在外部路径上的行驶速度,单位mm/s。
11、SearchRackDistance(INTEGER32)
激光头扫描货腿的搜索半径,单位mm。
目前,科尔摩根 NDC料腿识别方案已在多家大型轮胎企业落地应用,助力构建 “地空联运、智能调度、柔性适配” 的全流程自动物流体系。伴随新能源轮胎、智能轮胎发展,CVC控制器将持续迭代升级,以更强大的算力、更精准的控制、更开放的生态,推动轮胎行业物流自动化向更高阶智能演进,为产业高质量发展注入强劲动力。
文章来源:科尔摩根自主移动解决方案
图片来源:科尔摩根自主移动解决方案
转载平台:微信公众号
责任编辑:朱晓裔
审 核 人:李峥
热点文章
-

供需双驱,链通全球 | CeMAT ASIA 2026参观登记全面开启
2026-07-27
-

科尼丨每一台起重机都至关重要,维护保养同样不容忽视
2026-07-30
-

-

从入库到出库,林德MyMA全栈应用软件如何让智能工厂“自己运转起来”
2026-07-30
-

基于Flexsim仿真的输送设备研究
2026-07-29
-

凯乐士案例 | 省下2200平方米,长缆科技的仓库做对了什么?
2026-07-27
-

合力宇锋丨以穿梭机器人开启酒水行业智能仓配新模式
2026-07-31
-

从物料搬运到全域数智移动|中力629创新大会启幕物流智造新范式!
6月29日至30日,中力机器人第八届629新产品、新技术、新模式发布大会在浙江安吉中力数智工业园区圆满举办。本届大会以“从物料搬运到数智移动”为核心主题,聚焦AI赋能、全场景机器人商用落地、产业生态共建,汇聚全球千名行业伙伴、相关协会领导、学界专家与媒体代表等于一堂,共议数智移动未来。
作者:
-
特约观察 | 从全球视野看穿梭车技术演进与市场突围
-
创新与服务并重 于大势中觅商机
-
2024进博会:林德车队管理系统
-
2024进博会:林德无人叉车
-
2024进博会:林德氢燃料电池系统叉车







评论
加载更多