马路创新披荆斩棘,率先跨入VSLAM 2.0时代
近日,马路创新宣布其自主研发的独立VSLAM定位导航技术实现新突破,并成功落地多个业务场景,标志着马路创新率先跨入VSLAM2.0时代。
VSLAM 2.0 采用业内独创的全环境感知技术,通过算法优化实现了单图150KM的超大范围行程定位,进一步优化了SLAM技术在实际应用中的表现效果。同时更高的定位鲁棒性将帮助智能移动机器人在复杂工况下的稳定应用,助力企业客户在工业4.0的道路上迈出坚实的一步。
VSLAM定位导航
定位导航技术是移动机器人关键底层核心技术。相较于磁条、QR码等需要安装辅助定位措施的导航方式,SLAM(simultaneous localization and mapping 中文意为“即时定位与地图构建”)导航方式使得机器人可以像人一样识别周边环境,从根本上摆脱了对外部环境的依赖,使得机器人能够在更广范围内活动,同时,人工智能的应用也使得机器人具备更好的定位柔性以及更强的稳定性。
按照传感器的分类,业内通常将SLAM分为激光SLAM和视觉VSLAM。
激光SLAM:从早期利用反光板的三角定位方式开始,激光SLAM通过激光LiDAR传感器,扫描周围环境中的物体,对不同时刻的不同定位信息进行对比计算出相对距离,完成对机器人自身定位。
视觉VSLAM:利用视觉摄像头拍摄周围的图像,通过图像识别技术,采集图像中物体位置的信息,将不同时刻不同位置中,环境物体与机器人的相对位置联系起来,实现机器人的自主导航定位功能。
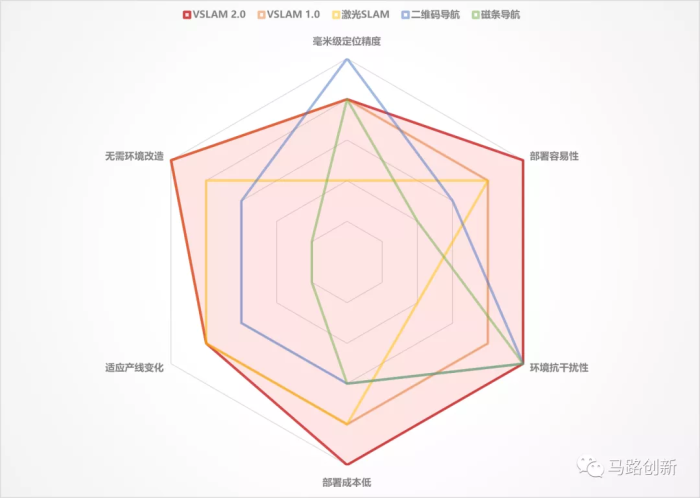
(常见定位导航方式的六维雷达对比图)
“真视觉”VSLAM2.0,定位导航性能大幅提升
为了满足客户的各种复杂场景需求,具有视觉导航功能的设备已然成为趋势。同时市面上也出现了多种类型的混合导航技术,例如视觉传感搭配激光SLAM进行工作,以此进行所谓的优势互补,但混合导航中的VSLAM的实际作用难以考证。究其原因,还是受制于视觉导航算法的开发难度,使得视觉导航技术仅被应用于较小空间中,而在大部分工业场景下,仍需依赖激光SLAM或是QR码导航来实现,而搭载2套以上传感器的设备,一方面功能冗余,同时所需成本也会显著上升。因此,能在真实工业场景下,实现全程独立视觉导航的技术,才对客户具有实际意义, 才能称为“真视觉”。

(搭载VSLAM2.0定位导航的MMC-1000自主移动机器人)
不积跬步无以至千里,马路创新2018年发布的VSLAM1.0,已能承载高达40km的建图行程。如今,经过2年多的研发攻关,马路创新新推出的VSLAM 2.0导航技术,再次通过技术创新,将领先的VSLAM技术更全面地落地智慧物流与智能制造。
相较于已经商业化的VSLAM 1.0,VSLAM2.0真正实现了全环境感知;通过算法优化,压缩海量图片信息,实现了总行程从40km提升至150km的超大范围跨越。VSLAM2.0同时采用边缘计算,支持多机交互,使每台AGV/AMR都具备大数据学习能力及自适应学习能力,在定位导航性能做到全方位大幅提升!
· 全环境感知,不受地纹及地面环境变化的影响;
· 实现每秒130Hz匹配频率,支持150KM超大范围行程;
· 亚毫米级定位精度,满足产线设备/机械臂等高精度定位配合需求;
· 克服环境光线变化对定位导航的影响,“自动驾驶”无需局限于室内封闭环境;
· 大数据自适应环境学习,克服日常路径实时变化影响;
· 微秒级响应能力,高稳定性,杜绝定位丢失风险;

(搭载VSLAM2.0定位导航的MM-200自主移动机器人)
同样,市场对于新的技术突破也是反映迅速,迭代后的VSLAM 2.0立即获得多家客户青睐,即将交付多家知名汽车生产制造企业。
无独有偶,近日马路创新凭借VSLAM2.0的技术创新,领先行业的研发实力,及商业落地能力,入选“2020年中国人工智能领域高成长企业TOP100”榜单。

2020年中国人工智能领域高成长企业TOP100
VSLAM赛道上的先行者,披荆斩棘一路快跑
目前市场上普遍认为VSLAM由于采集图像时产生的储存空间大、运算复杂、算法对处理器的要求较高,因此普通处理器根本无法处理如此大量数据,导致VSLAM难以落地真实使用场景,仅能在小场景特定环境下使用。另外,市面上基于激光的可用算法比较常见,相反的,实现VSLAM的真正落地,则需要投入大量的研发力量,资金力量和时间成本,这在很大程度上打消了大部分企业探索VSLAM的积极性和可能性。
从0到1全自主研发的难度可以想象,因此,放眼整个行业,在VSLAM赛道上实现技术突破并且落地商用的企业,可谓凤毛麟角。马路创新拒绝拿来主义,不走捷径。何况在探索VSLAM的道路上无捷径可走,需要企业一步一个脚印,积累经验,潜心研究。马路创新凭借对技术的信仰,对突破行业瓶颈的渴望,对解决客户痛点的执着,不惜巨大投入,在坚持自主研发这一充满艰辛的道路上披荆斩棘。如埃隆马斯克坚信纯视觉导航必定是最终的解决方案一样,马路创新也是勇敢的尝试者和先行者。



















获取更多评论