海豚之星丨小搬—智能搬运小助手,开启人机共融新时代
小搬强势来袭“
自“小海豚”之后,海豚之星的研发工程师们又有新的灵感,构建一个包含“人”因素在内的搬运机器人运动规划系统,将人综合环境信息做出的决策和机器智能做出的决策进行融合,充分结合操作工过往驾驶习惯模型,给出最终的行驶策略,并利用该策略优化机器智能规划模型。
这种方法充分考虑到“人”在控制回路当中的作用,希望借助人的经验和决策知识来进一步优化现有的叉车运动规划框架,以达到机器智能与人类智能共同提升的目的。
正是这一构想推动了海豚之星最新产品——“小搬”的诞生。
1、小搬的优势
“小搬”的设计始终坚持“一切皆为简单而来”,追求极致的用户体验。
窄
窄通道、转弯半径小
“小搬”车体设计小巧简约,所需通道宽度仅1950mm,最小转弯半径1290mm,能够在狭窄的工厂环境中自由运行,很大程度上节约运输空间,让利更多空间用于生产、仓储等,实现价值升级。
巧
栈板识别、精巧定位
“小搬”在SLAM激光的基础上支持二维码、3D视觉相机,多传感器融合感知模式,提升复杂场景的适应能力,定位精度更高,能够实现识别偏位±10°的栈板,并精准叉取,满足大部分高精度的作业需求。
随
人机跟随、便捷高效
多传感器融合感知,能够实现高效人体目标识别、智能目标跟随,最终实现人机跟随。
快
跑得快、运行效率高
“小搬”的运行效率并不会因为运行空间小而打折,反而跑得更快,速度能达到2m/s,提高产线运输效率。
易
无需网络、上手快
无需网络,从开机到最后的运行,操作部署简单方便,无需环境改造,全程设置提示信息,7个步骤完全搞定。
协
手动+自动一体、自由切换
根据任务需求,灵活切换车辆运行状态。这是人机共融的基础实现。
融
APP交互、方便快捷
为“小搬”量身设计的APP软件RCT-1000,搭配平板使用,更加方便快捷,无需切换各个软件/控制器,对客透明,提高用户粘性。
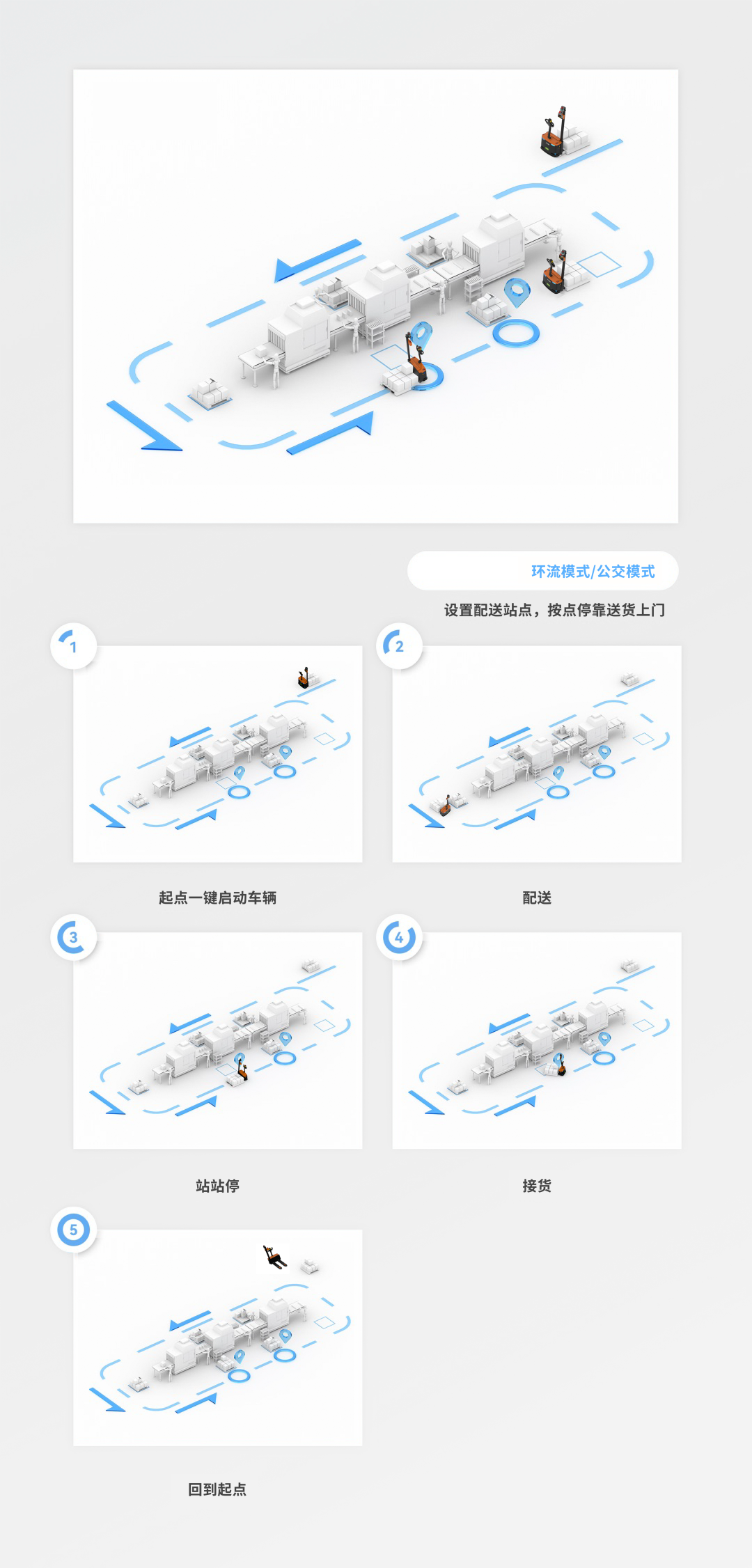
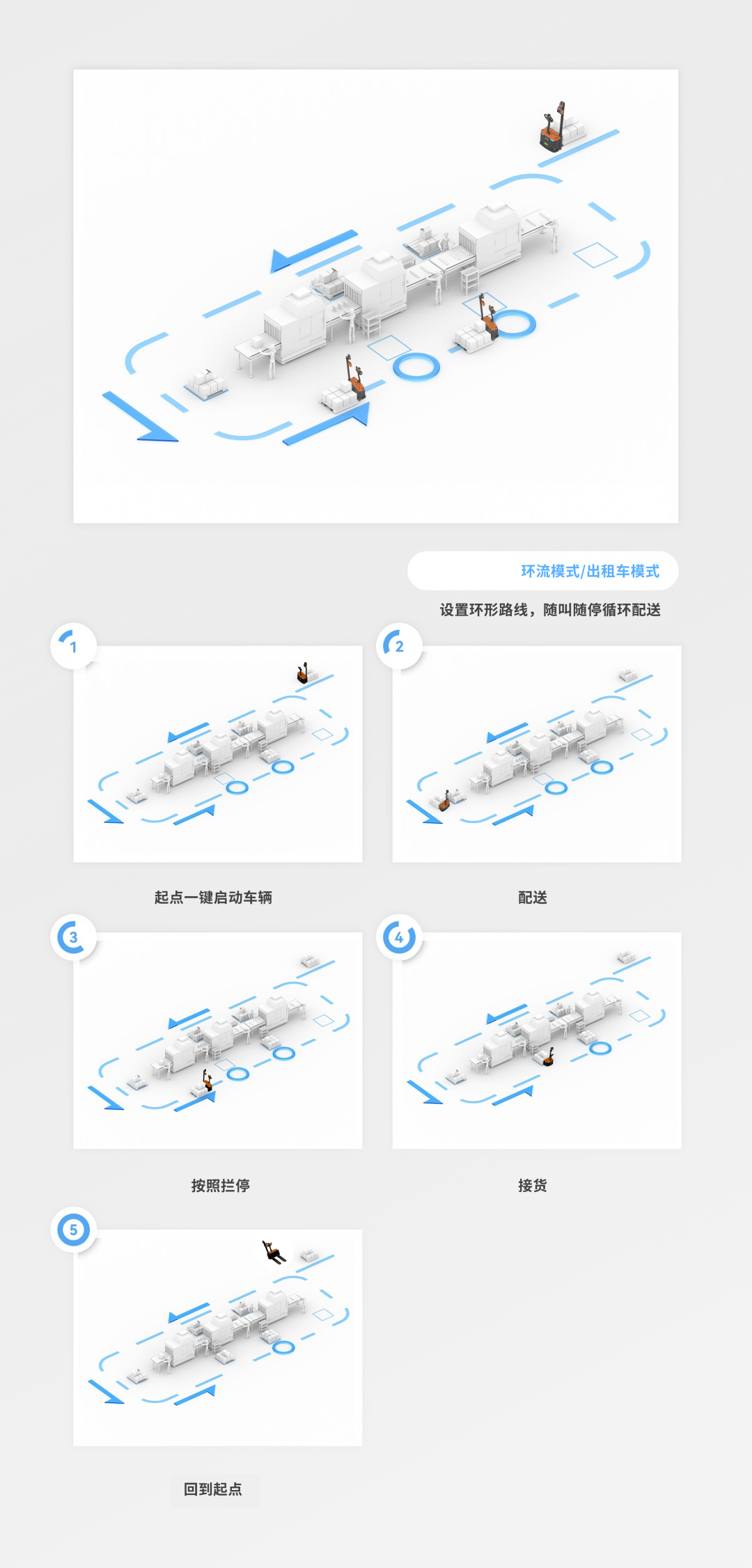
2、小搬的亮点
创新模式设计——公交车/出租车模式,将工厂流水线看成日常生活轨迹,环线内循环运行,实现点对点的循环搬运,满足多数工厂的刚需。
公交车模式
到点即停
出租车模式
随叫随停
3、七步操作
STEP ONE: 开机设置
STEP TWO: 建图
STEP THREE: 规划路线
STEP FOUR: 设置站点
STEP FIVE: 安全设置
STEP SIX: 模式设置
STEP SEVEN: 运行

热点文章
-

从物料搬运到全域数智移动|中力629创新大会启幕物流智造新范式!
2026-07-02
-

柯马收购巴西仓储物流自动化企业 Invent,拓展端到端内部物流平台
2026-07-08
-

林德自动化 | 软件为核心,覆盖全场景,重塑内部物流
2026-07-02
-

为守护低温酸奶的“新鲜”,瑞仕格物流竟然这么拼!
2026-07-03
-

燃情世界杯,德马格物料搬运解决方案为赛场保驾护航
2026-07-02
-

【极智嘉】全球首秀!“真干活”的具身智能,重磅集结WAIC
2026-07-02
-

2026年6月物流业景气指数显示:需求扩张区域均衡增长 经营企稳内生动力增强
2026-07-06
-
从物料搬运到全域数智移动|中力629创新大会启幕物流智造新范式!
6月29日至30日,中力机器人第八届629新产品、新技术、新模式发布大会在浙江安吉中力数智工业园区圆满举办。本届大会以“从物料搬运到数智移动”为核心主题,聚焦AI赋能、全场景机器人商用落地、产业生态共建,汇聚全球千名行业伙伴、相关协会领导、学界专家与媒体代表等于一堂,共议数智移动未来。
作者:
-
特约观察 | 从全球视野看穿梭车技术演进与市场突围
-
创新与服务并重 于大势中觅商机
-
2024进博会:林德车队管理系统
-
2024进博会:林德无人叉车
-
2024进博会:林德氢燃料电池系统叉车







评论
加载更多