海豚之星丨具身智能:为AI装上“身体”和“手脚”
一、具身智能:从“离身”到“具身”的范式跃迁
当波士顿动力的 Atlas 机器人完成后空翻,当 OpenAI 的 Dactyl 机械臂成功复原魔方,当特斯拉 Optimus 在工厂中自主装配零件,人类终于意识到:智能的终极形态,不应囿于硅基芯片构建的虚拟世界,而必须依托具身载体,通过与物理环境的动态交互不断演化与进化。
具身智能(Embodied Intelligence),指的是通过物理身体与环境持续交互,从而实现感知、决策与行动一体化的智能系统,被普遍视为继大语言模型之后,人工智能领域的下一场范式革命。
相较于传统的“离身智能”(如 ChatGPT 等纯算法模型),具身智能的核心在于“身体”与“环境”的双重在场,强调智能体在真实物理世界中的“存在性”。它需要像人类一样,依靠视觉、触觉等多模态感知理解环境,进行自主路径规划,并灵活执行任务。具身智能的思想可追溯至计算机科学先驱艾伦·图灵于1950年提出的“图灵测试”,但真正的技术突破,则是在2020 年代,大模型算法与机器人硬件深度融合之后才得以加速实现。
二、具身智能的三大核心技术
1.感知与交互:
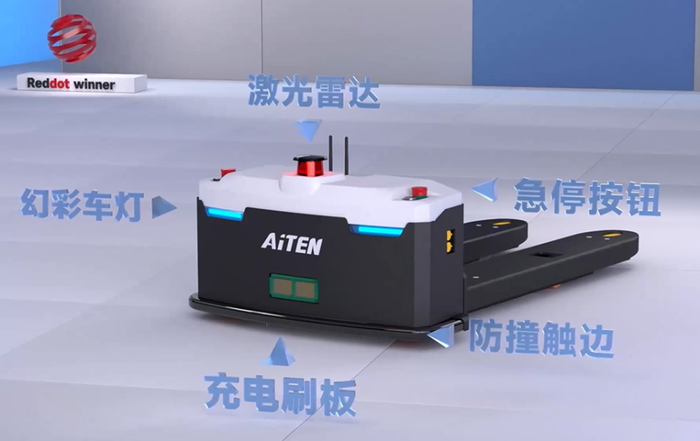
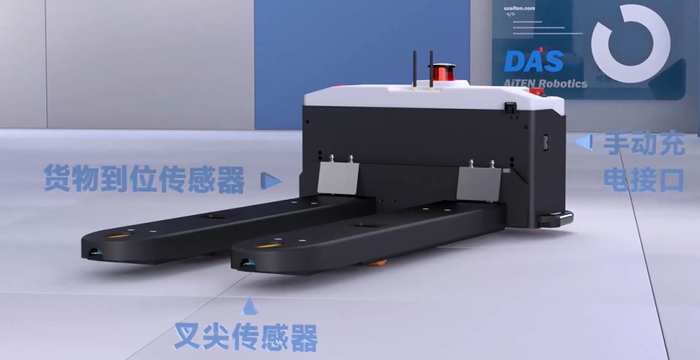
具身智能的感知系统已突破传统工业机器人的局限,借助激光雷达、3D视觉、触觉传感器等多模态设备,实现对环境信息的实时精准感知。以海豚之星 AiTEN 为例,其搬运机器人 MP10 集成了 360° 安全雷达、急停按钮、防撞触边、叉尖传感器等多种安全模块,构建起一套覆盖全方位的三维立体防护系统,有效提升了运行的稳定性与安全性。
2.自主决策:
海豚之星 AiTEN 系统依托大模型解析自然语言指令,结合环境感知数据生成动态任务规划。其 RCS 智能控制系统通过高精度传感定位,实现实时数据分析与路径自动优化,具备即时异常响应能力;DAS 数据分析系统则支持多维数据的采集、存储、监控与处理,为物流全流程提供全面的数据支撑。与传统依赖预设规则的系统不同,该决策机制通过与物理环境的持续交互,逐步形成“具身化认知”——如机器人在多次碰撞中学习避障策略,在抓取失败中优化力度控制,从而实现更类人化的适应与学习能力。
3.持续学习:
硬件技术的持续突破为具身智能提供了坚实的物理基础,使智能体能够在与环境的交互中不断积累经验,并通过强化学习不断优化执行策略。以双足机器人为例,智能体可发出“前进”指令,而环境的实时反馈将影响机器人各部位的动态协调,促使其在不断调整中实现平衡控制与持续前行。
文章来源:海豚之星AiTEN
图片来源:海豚之星AiTEN
转载平台:微信公众号
责任编辑:朱晓裔
审 核 人:李峥
热点文章
-

破解窄通道仓储困局,林德电动拣选叉车助力某全球汽车行业客户物流升级
2026-06-18
-

「机器人大脑」第一股诞生!仙工智能正式登陆港交所
2026-06-24
-

igus推出适用于垂直物料搬运的新型拖链供能系统
2026-06-24
-

零接触物流的集成技术实践
2026-06-23
-

鸿基始创 骏业日新|英特诺亚太创新枢纽正式落地苏州
2026-06-22
-

实效化管理的落地应用
2026-06-23
-

赋能绿色“锦”程,林德新能源电动平衡重叉车批量交付永荣股份
2026-06-25








评论
加载更多