无惧风雪雨雾,驭势科技145万公里真无人运营实战集锦
对于人类驾驶员而言,在恶劣的天气情况下开车,从不是一件令人愉悦的事。而无人车在极端天气中的行驶,同样面临极大的挑战。克服极端天气、恶劣气候对无人车可能造成的不良影响,也成为了工程师们需要解决的关键问题之一。
极端天气对无人车的影响
有数据统计,传统汽车在极端天气环境下的事故数量占比高达22%,雨雪、大风、大雾会导致驾驶员出现判断失误。极端天气对于无人车的环境感知系统同样带来了挑战。人类驾驶员在极端天气时主要依靠双眼和耳朵来感知环境,无人车感知环境则主要依靠摄像头、激光雷达和毫米波雷达等传感器。

无人车通过接收摄像头、激光雷达、毫米波雷达等传感器输入的数据,来获取周围目标物的位置、尺寸、分类信息和跟踪信息,还有未知分类的障碍物、目标车的尾灯、护栏、红绿灯、植被等都需要被感知到。所有这些信息都会输出到到决策/规划模块使用。
那么在不同的气候条件下,传感器需要经受何种挑战呢?
· 摄像头
摄像头就像是无人车的眼睛,是非常重要的传感器之一,但也极其容易受到极端天气的影响。当雨雪雾天气时,空中的雨滴、雪花、雾会降低摄像头的能见度,甚至会落在摄像头上造成部分遮挡,让摄像头输入的图像数据失去意义。
· 激光雷达
激光雷达精度高,主要用于物体检测、道路分割和高精度地图构建。通过发射和接收激光束,分析激光反射后的折返时间,计算和障碍物的相对距离,能够直接获取三维的点云数据,绘制环境地图,以此进行环境感知。
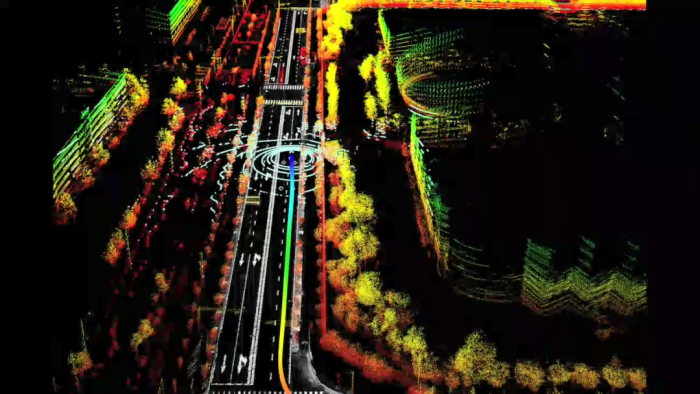
暴雨天气时容易形成团雾,让激光雷达误以为是障碍物;雪花和大雾天气下会影响激光雷达反射,从而形成大量噪点,影响定位和感知精度;在极冷或极热的环境下,激光雷达测量的时间会产生延迟,大大降低近场精度。
· 毫米波雷达
毫米波雷达的工作原理和激光雷达类似,但发射的毫米波拥有更长的波长,在极端天气下有着不错的表现。但同样受制于波长原因,毫米波雷达的探测精度较低,在行人检测和目标形状和大小信息分类方面能力不足,需要和其他传感器配合使用。
无人车如何应对极端天气
那么驭势科技如何解决极端天气中的无人驾驶难题?提升无人车在极端天气中的定位感知能力,主要围绕无人驾驶系统最核心的三个要素进行:传感器、算法、数据。
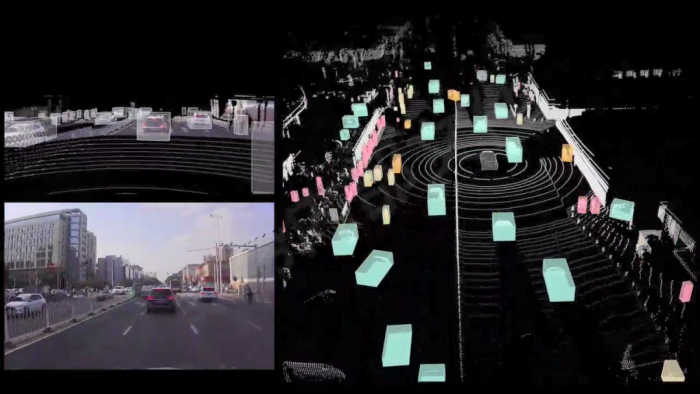
· 多传感器融合
摄像头、激光雷达、毫米波雷达这些传感器都有自身的优势和局限性,想要在极端天气下发挥传感器的最大性能的方式就是多传感器融合。使用不同形式的多个传感器来理解一个场景,能够扬长避短,互为冗余,提升无人车的感知定位能力。
· 感知算法优化
在极端天气下安全行驶,需要算法的不断演进。深度学习依然是目前最重要的方法,后续网络规模会变得更大、更复杂,从而具有更高精度和更强功能。
在实际应用中,深度学习方法还需要和其他的机器学习方法、非学习方法结合,以得到实际可用的、功能边界清晰的、可靠的系统。
同时,持续扩展“运行设计域”(ODD)是对算法演进的一个指引,可以让无人车在不同极端天气的要素范围内,从易到难进行持续扩展。
· 数据驱动系统演进
为了让无人车更好地应对极限气候挑战,必须在数据集中有足够的多样条件覆盖各类天气状况。无人车会在不同的城市、不同的道路和区域、承担不同的业务,每种车型上的传感器配置也不一样,这几方面因素都会导致数据有明显差异。
使用一个数据驱动的跨场景、业务和传感器的统一框架,可以综合考虑不同场景、业务、传感器的数据,从而高效地、最大程度复用各场景中的数据价值,并节省标注工作成本,并提升效率。
驭势科技无人车极端天气实战
截至2022年4月,驭势科技无人车队已成功落地在大量机场、厂区、园区、城市出行和城市配送服务场景中,真无人运营里程累计145万公里。
在气候条件迥异的不同地区,驭势无人车队经受住了极端天气带来的考验,以“全场景、真无人、全天候”的无人驾驶技术创造更多的经济效益和社会效益。



















获取更多评论