科尔摩根AMS丨如何快速进行特定轮系结构车型的仿真测试?CVC700轻松帮您搞定!
作为AGV车辆的专用控制器,CVC700以强大的功能和高精度的控制为各行各业的物流运输提供强力支持
其中,通过它的仿真功能可以让您毋需AGV车辆实体轻松完成设计验证工作。本文将为大家介绍一种典型应用。
有很多小伙伴问到,NDC是否能支持某种轮系结构的车型?

在我们的官方资料库*中,收录了近30种轮系配置,但我们能够做到的还远不止于此。如果您暂时没有账号无法登陆我们的官方资料库,或者您的车型暂时不在我们的资料库中,可以通过CVC700的仿真功能,亲自验证是否可行。
* 官方资料库仅针对科尔摩根合作伙伴开放,需具备账号才能登录
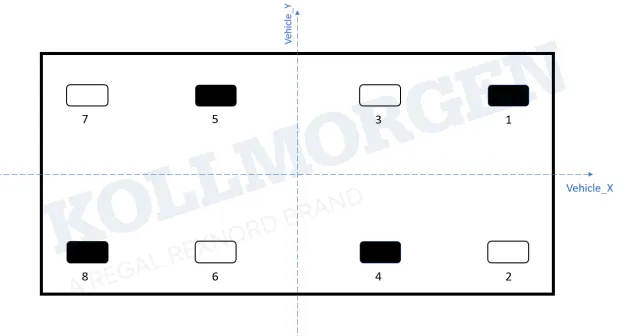
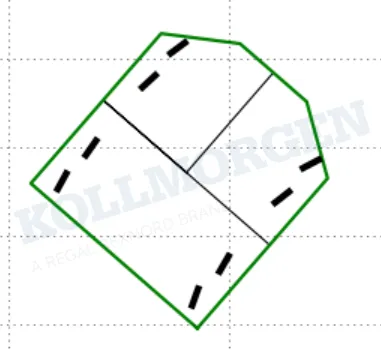
例如,图示为一个8轮重载全向车型,其中1/4/5/8为转向+行走轮,2/3/6/7为转向轮。
01
打开CVC700的配置软件Vehicle Application Designer,新建一个项目,选择QUAD Multiwheel结构,在轮系配置页面,进行如下操作:
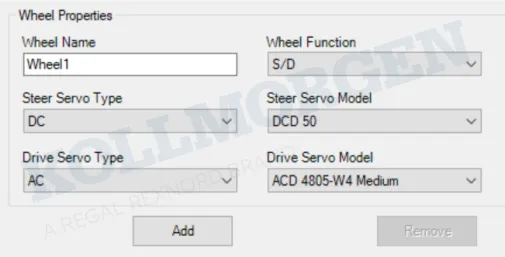
如果应用的是AGV车辆实体,那么这里就要指定转向和行走的驱动器,比如NDC即将发布的通用型GEN7。而现在我们只需要进行仿真,因此可以忽略驱动部分。

此处需要注意!添加舵轮的顺序,前两个轮子必须是相距最远的,比如1和8。

其余6个轮子,则无先后顺序之分。

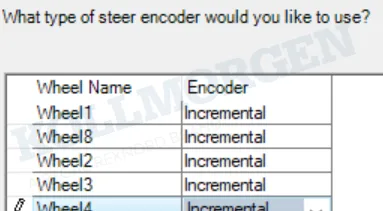
在编码器配置界面,因为仿真并不需要真实的数据反馈,所以选择增量型编码器即可。
02
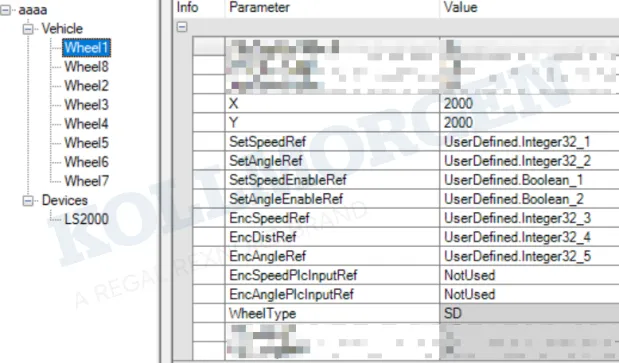
接下来,便是在VAD的Physical view界面中,对每个轮子进行配置。设置正确的坐标,给定/反馈全部使用内部变量。
注意!因为索引使用的是内部变量,所以CVC700在计算其数学模型时,就需要一个kick off信号。在实体车上,它通常来自于CAN节点子设备。进行仿真时,您可以在PLC中写一段toggle程序,也可以更简单地——使用SDIO中的数据,因为SDIO本身就是内嵌在CVC700中的CANOpen IO设备。
在SDIO的属性配置中,首先将调节器1设置为位置调节器,再任意设置SDIO.AuxEnc1Scale为1000。

然后,将1/4/5/8(转向+行走)轮的EncSpeedPlcInputRef设置为SDIO.AuxEnc1Speed,将所有轮的转向EncAnglePlcInputRef设置为SDIO.AuxEnc1Position。

03
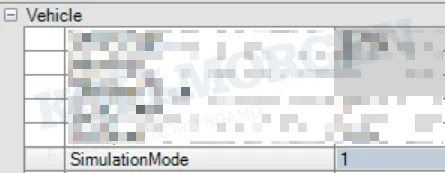
至此,我们便完成了8舵轮轮系的全部配置工作。此时,您只需要将参数Vehicle.SimulationMode设置为1,再下载到CVC700控制器,即可验证这台8舵轮车的运行性能。
打开NDC的调试工具Vehicle Diagnostic Tool,即可看到该车的模型。
使用手操器MCD8驱动这台车,就可以看到车辆手动运行时的姿态和轨迹。若暂无MCD8可用,也可以直接在仿真模式下,让车辆自动运行。
在VAD的导航初始化界面,直接设定位置为点坐标。在VDT中即可观测到,车辆“跳”到了该点。
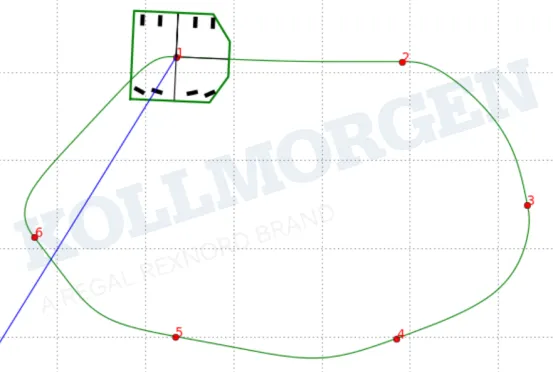
而当设置为自动模式,便可以创建本地任务,让车辆自动运行。
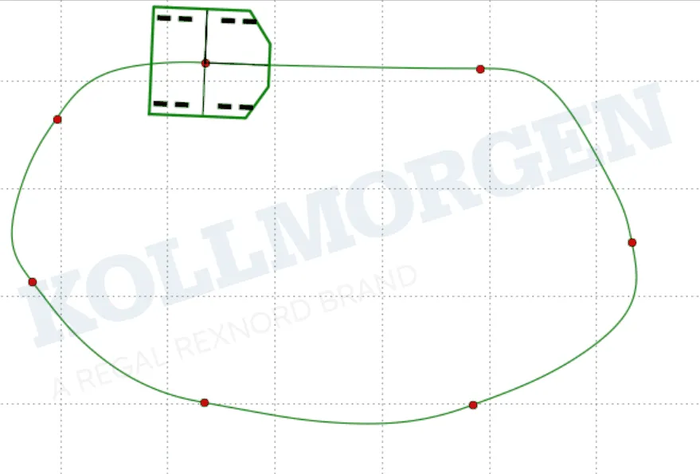
通过这种方式,您可以验证这台8舵轮车在各种转弯、旋转、平移等路径上的性能表现,也可以让车辆连接到NDC的调度软件System Manager上,从Host下发订单,让该车去执行任务。
以上所有这些工作只需要一个CVC700控制器和一台电脑,坐在办公室里便可运筹帷幄,决胜千里,何乐而不为?
文章来源:科尔摩根自主移动解决方案
图片来源:科尔摩根自主移动解决方案
转载平台:微信公众号
责任编辑:朱晓裔
审 核 人:李峥
热点文章
-

柯马收购巴西仓储物流自动化企业 Invent,拓展端到端内部物流平台
2026-07-08
-

拥抱物理AI:兰剑智能迈向“具身智能系统方案”新赛道
2026-07-08
-

2026年6月中国仓储指数显示:指数重回扩张区间 行业运行恢复向好
2026-07-07
-

2026年6月中国仓储指数为50.2%
2026-07-07
-

-

igus全新免润滑滚珠轴承上市,悬挂输送机可靠性再升级
2026-07-09
-

超越标准AutoStore™:卡迪斯如何持续推动仓储自动化创新
2026-07-10
-

从物料搬运到全域数智移动|中力629创新大会启幕物流智造新范式!
6月29日至30日,中力机器人第八届629新产品、新技术、新模式发布大会在浙江安吉中力数智工业园区圆满举办。本届大会以“从物料搬运到数智移动”为核心主题,聚焦AI赋能、全场景机器人商用落地、产业生态共建,汇聚全球千名行业伙伴、相关协会领导、学界专家与媒体代表等于一堂,共议数智移动未来。
作者:
-
特约观察 | 从全球视野看穿梭车技术演进与市场突围
-
创新与服务并重 于大势中觅商机
-
2024进博会:林德车队管理系统
-
2024进博会:林德无人叉车
-
2024进博会:林德氢燃料电池系统叉车







评论
加载更多